Người Việt hải ngoại mở công ty chế tạo máy bay không người lái UAVđể bán khắp thế giới
20.09.2023 11:34
Cách chế tạo một thiết bị bay không người lái UAV (Phần 1)
22 Th3
Phần 1: Các thuật ngữ thường gặp
Chủng loại
UAV:
(Unmanned Aerial Vehicle): phương tiện bay không người lái, danh từ để chỉ chung mọi thiết bị bay sử dụng phương thức điều khiển từ xa
Drone:
Từ đồng nghĩa với UAV, nhưng thường nó được dùng để chỉ các thiết bị bay không người lái dùng cho các mục đích quân sự, còn từ UAV được dùng để chỉ các thiết bị sử dụng cho mục đích giải trí.
Multirotor:
Có thể hiểu là các thiết bị bay sử dụng nhiều cánh quạt (dạng lên thẳng)
UAV có bốn động cơ/cánh quạt và bốn cánh tay đỡ. Đặc điểm là thường sư dụng 2 dạng kết cấu tay đỡ là dạng chũ thập “+” (phía trướccó một tay) và dạng chữ “X” (phía trước có 2 tay)
Tricopter
UAV có ba động cơ/ cánh quạt và thường có 3 tay đỡ.
Spyder
UAV kiểu “Spyder” (thường là UAV loại quad hoặc hexa) mà các cánh tay đỡ motor không nằm đối xứng với nhau khi nhìn từ trên xuống
V-Tail
UAV có bốn động cơ/cánh quạt nhưng ở mỗi cặp tay đỡ tạo thành hình chữ “V”
X4 / X8
X4 và X8 là dạng UAV với 4 cánh tay đỡ; X4 thì có 4 động cơ ở cuối mỗi tay còn X8 thì có 2 động cơ trên một tay (1 cái ở mặt trên và 1 cái ở mặt dưới)
Y3 / Y6
Y3 và Y6 là dạng UAV với 3 cánh tay đỡ; Y3 thì có 3 động cơ ở cuối mỗi tay còn Y6 thì có 2 động cơ trên một tay (1 cái ở mặt trên và 1 cái ở mặt dưới)
Cỡ (mm)
đo bằng đơn vị milimet (ví dụ 450 mm), nó thể hiện khoảng cách lớn nhất giữa 2 động cơ trên một UAV. Cỡ của UAV cũng có thể dùng định xác định “lớp'” UAV (micro, mini, ..)
RTF
Ready-to-fly : UAV không cần lắp ráp và có thể thực hiện bay ngay.
ARTF hoặc ARF
Almost-ready-to-fly: UAV đã lắp ráp hầu hết các thành phần trong đó chưa bao gồm máy thu (RX) và máy phát tín hiệu (TX), gọi chung là RC.
BNF
Bind-And-Fly: UAV đã được lắp ráp hoàn thiện gồm của RX, người điều khiển chỉ cần chọn một TX tương thích và tích hợp với RX để thực hiện điều khiển. Các UAV sản xuất theo hướng này được người dùng lựa chọn nhằm tiết kiệm chi phí cũng như có thể dễ dàng để phát triển các UAV mới.
UAV 4 cánh Quadcopter
UAV đuôi chữ V
Khung UAV 8 cánh Octocopter
Bộ phận cơ khí
Khung
Khung giống như bộ xương của máy bay nhằm liên kết các bộ phận lại với nhau. Một khung đơn giản thường thì motors connected to aluminum or other lightweight extrusions (“arm”) sau đó sẽ được nối với thân chính.
Vỏ
Nhằm bảo vệ các bộ phận của thiết bị, đảm bảo tính thẩm mỹ đôi khi còn nhằm cải thiện mặt khí động của thiết bị. Một số UAVs có vỏ nhựa đóng vai trò như là khung thân.
Càng hạ cánh/ Chân
Càng hạ cánh ở multirotor thường không có bánh xe như ở các máy bay thông thường nhằm tránh việc chúng di chuyển và giảm trọng lượng thiết bị, càng có thể được lắp đặt hoặc tháo dời. Ở một số UAV, càng khi được lắp có thể gặp lại khi bay nhờ các servo.
Bảo vệ cánh quạt
Đây là một bộ phận bảo vệ có tác dụng bảo vệ cánh quạt khỏi sự va đập với các vật thể khác, hạn chế tối thiểu các hư hỏng.
Đèn LED
(Light Emitting Diode) có thể lắp lên UAV để xác định vị trí của chúng trong khi trời tối hoặc điều kiện ánh sáng thấp.
Giảm chấn
Giảm chấn là các núm cao su có tác dụng hạn chế các rung chấn khi UAV hoạt động
Trọng tâm
(Center of Gravity – CG) là điểm mà ở đó khối lượng của máy bay được phân bố đều.
Kẹp
Kẹp ống là các đầu nối thường dùng trên các ống tuýp tròn để lắp các thiết bị lên ống.
Đầu nối
Dùng để lắp và thoát các dây điện, được gắn vào cuối các dây. Đầu nối phổ biến dùng cho pin là loại Deans & XT60, còn với bộ điều khiển bay và các cảm biến thì dùng đầu nối 0.1″
G10
Đây là một loại composite sợi thủy tinh, vật liệu này được sử dụng phổ biến thay cho sợi cacbon để làm khung UAV vì độ cứng và trọng lượng nhẹ nhưng đặc biệt là giá thành rẻ hơn
Giảm chấn
Càng hạ cánh
Vỏ UAV
Kẹp ống
Đầu nối Deans & XT60
Đầu nối 0.1″
Thiết bị và bộ phận thực hiện bay
BEC
(Battery Eliminator Circuit) là một mạch điều chỉnh điện áp lắp trong ESC có thể cung cấp một dòng điện DC 5V power tới bất kỳ thiết bị điện tử nào
Cánh quạt
Cánh quạt là bộ phận có bề mặt khí động nhằm tạo ra lực nâng cho UAV. Một bộ cánh quạt thường có hai hoặc bốn cánh, các cánh có thể là cánh gập hoặc cánh cố định
CW (Clockwise) chiều quay theeo chiều kim đồng hồ; CCW (Counter-Clockwise) chiều quay ngược chiều kim đồng hồ. Ở các UAV đa cánh, thông thường người ta sử dụng các cặp cánh quay ngược chiều kim đồng hồ.
(Lithium Polymer) là loại pin phổ biến nhất hiện nay dùng trên các thiết bị bay không người lái UAV bởi trọng lượng nhẹ (so với khả năng lưu trữ) và tốc độ chuyển đổi dòng điện cao Hiện nay trên thị trường có rất nhiều loại pin nền Lithium như LiFe, LiMn, LiOn, …
Động cơ (Motor)
dùng để quay cánh quạt; các UAV nhỏ thường được sử dụng động cơ có chổi than còn với UAV lớn thì động cơ không chổi than được sử dụng rộng rãi hơn nhiều
Mạch điện tử PCB
(Printed Circuit Board) là một miếng phẳng làm từ sợi thủy tinh với các thiết bị điển tử được hàn lên
Bộ phân nguồn (Power Distribution)
Trong UAV có rất nhiều thiết bị sử dụng điện, do đó nguồn pin cần được chia nhỏ. Đó chính là lí do ta cần tới bộ phân nguồn (bảng mạch hoặc dây cáp). Nó nối với nguồn âm và dương của pin sau đó nối với nguồn của các thiết bị khác (hoạt động ở cùng một điện áp)
Đầu đạn (Propeller Adapter)
Thiết bị dùng để nối trục động cơ và cánh quạt
Prop Saver
Một loại moay ơ lắp trên đầu trục động cơ và thay thế cho đầu đạn
Servo
Servo là một loại thiết bị dẫn động, có thể quay với các góc chính xác
Lực đẩy
Lực đẩy là lực do động cơ và cánh quạt tạo ra (ở một điện áp ổn định), thường được đo bằng kilogram (Kg) hoặc pound (Lbs)
Pin LiPo
Cánh quạt CW / CCW
Mạch phân nguồn
Đầu đạn (Propeller Adapter)
(Propeller Saver)
Thiết bị điều khiển
Trạm điều khiển mặt đất
Có thể thay thế hoặc dùng kết hợp với transmitter cầm tay dùng để điều khiển UAV. Nó có thể gồm transmitter, ăng-ten, video receiver, màn hình, pin, máy tính và một số thiết bị khác
Kênh
Số kênh trên transmitter liên quan tới số tín hiệu độc lập mà transmitter có thể gửi
Bộ điều khiển bay Flight Controller
Bộ điều khiển bay có thể coi như là bộ não của UAV điều khiển tất cả các tiến trình xử lí dữ liệu, tín hiệu và tính toán. Nhân của một bộ điều khiển bay thường là một “microcontroller”. Bộ điều khiển bay thường có tích hợp lên một bảng bảng mạch các cảm biến, bao gồm gia tốc kế, con quay hồi chuyển, áp kế, la bàn, GPS,… Nếu bộ điều khiển bay có khả năng tự điều khiển máy bay (ví dụ như có khả năng điều khiển để tự định vị tọa độ dựa vào GPS), thì có thể xem nó là một thiết bị bay tự lái.
Cáp (Wiring Harness)
Nó được sử dụng để kết nối RX tới bộ điều khiển bay và một số thiết bị khác.
Tần số HF/ UHF / VHF
Đơn vị đo tần số sóng là Héc (Hz) HF – High Frequency: tần số cao; VHF – Very High Frequency: tần số rất cao; UHF – Ultra High Frequency: tần số cực cao
Sketch / Code
Là chương trình được nạp vào bộ điều khiển
Receiver
(RX) Là thiết bị xử lý các tín hiệu nhận được.
Transmitter / Radio
(TX) Là thiết bị phát ra các tín hiệu điều khiển tới RX
Tích hợp (Binding)
Cần tích hợp TX và RX để chúng có thể giao tiếp với nhau, một số bộ RX và TX đi cùng nhau có thể đã được tích hợp sẵn
Base Station
Transmitter
Flight Controller
Cảm biến và thiết bị định hướng
Cảm biến gia tốc (Accelerometer)
Cảm biến gia tốc đo gia tốc theo một trong ba phương, đơn vị đo thường là “g” hay gia tốc trọng trường.
Cảm biến con quay hồi chuyển (Gyroscope)
Cảm biến con quay hồi chuyển dùng để đo gia tốc góc theo 1 trong ba phương, đơn vị đo là độ trên giây bình .
Cảm biến áp suất/độ cao (Barometer/Altimeter)
Cảm biến áp suất cung cấp các thông số về độ cao của UAV thông qua việc đo lường sự thay dổi áp suất theo độ cao.
Cảm biến IMU
(Inertial Measurement Unit) gồm một cảm biến gia tốc và một cảm biến con quay hồi chuyển
Cảm biến từ (Magenetometer)
Ở các dạng robot đơn giản, cả biến từ được sử dụng như một là bàn để xác định phương hướng
Ống Pitot
Thiết bị đo tốc độ dòng khí
Ăng-ten (Antena)
Ăng ten là thiết bị dùng để nhận và gửi các tín hiệu đến và đi của UAV (các tín hiệu thường do transmitter tạo ra). Ăng-ten có nhiều laoji như có thể chia làm hai loại là ăng-ten đơn hướng (directional) và đa hướng (omnidirectional)
La bàn (Compass)
La bàn sẽ cung cấp các chỉ dẫn phương hướng.
Hộp đen (Flight Recorder)
Hộp đen sẽ ghi lại các giá trị từ các cảm biến trên UAV. Những thông số có thể sẽ được nạp vào bộ điều khiển bay trong các lần sau.
Pitch
Pitch is the angle of the nose to tail with respect to the ground, or in other words, the rotation of an aircraft about the axis from wing to wing
Roll
Roll is the rotation of the aircraft along the axis from its nose to its tail
Yaw
Yaw is the rotation of an aircraft about an axis perpendicular (90 degrees to) to the plane formed between the nose / tail and wing tips
Roll / Pitch / Yaw
Airspeed Sensor
GPS Module
Thiết bị ghi và truyền dẫn hình ảnh
Thiết bị thu phát hình không dây FPV:
(First Person View): UAV thường được lắp một camera điều khiển có thể nhận được các hình ảnh trực tiếp từ màn hình hoặc kính thực tế ảo được ghi lại từ camera đó
Gimbal:
Dùng để lắp camera, có thể được điều khiển xoay chỉnh bằng một servo hoặc động cơ không chổi than. Chức năng của nó là ổ định camera, chống rung.
Camera GoPro:
Là một trong những loại camera được sử dụng rộng rãi nhất hiện nay để quay và truyền tải video trên các phương tiện di chuyển
Màn hình LCD:
(Liquid Crystal Display) phát hình ảnh nhận được qua Receiver
Màn hình OSD:
(On Screen Display) hiển thị các thông số gửi từ thiết bị bay (như độ cao, tọa độ GPS, …)
Kính thự tế ảo VR:
(Virtual Reality) sẽ cho người đeo các trải nghiệm ấn tượng về hình ảnh
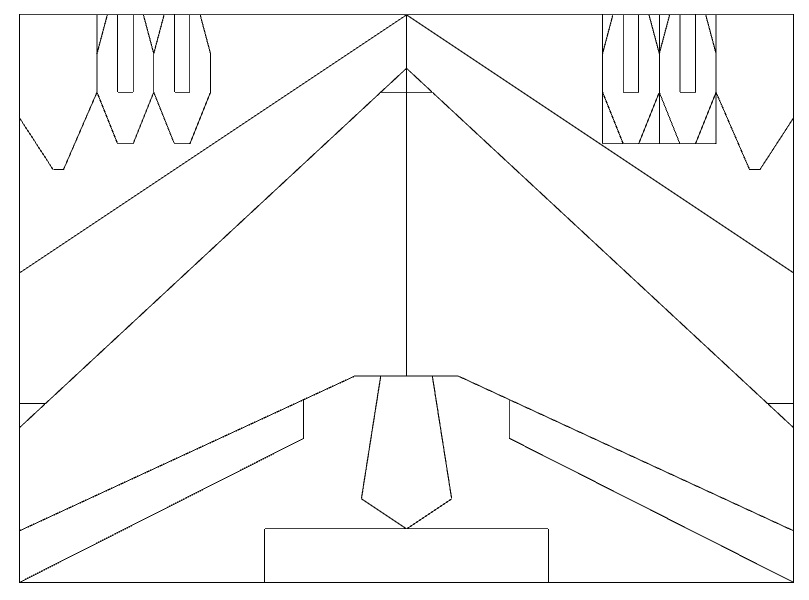
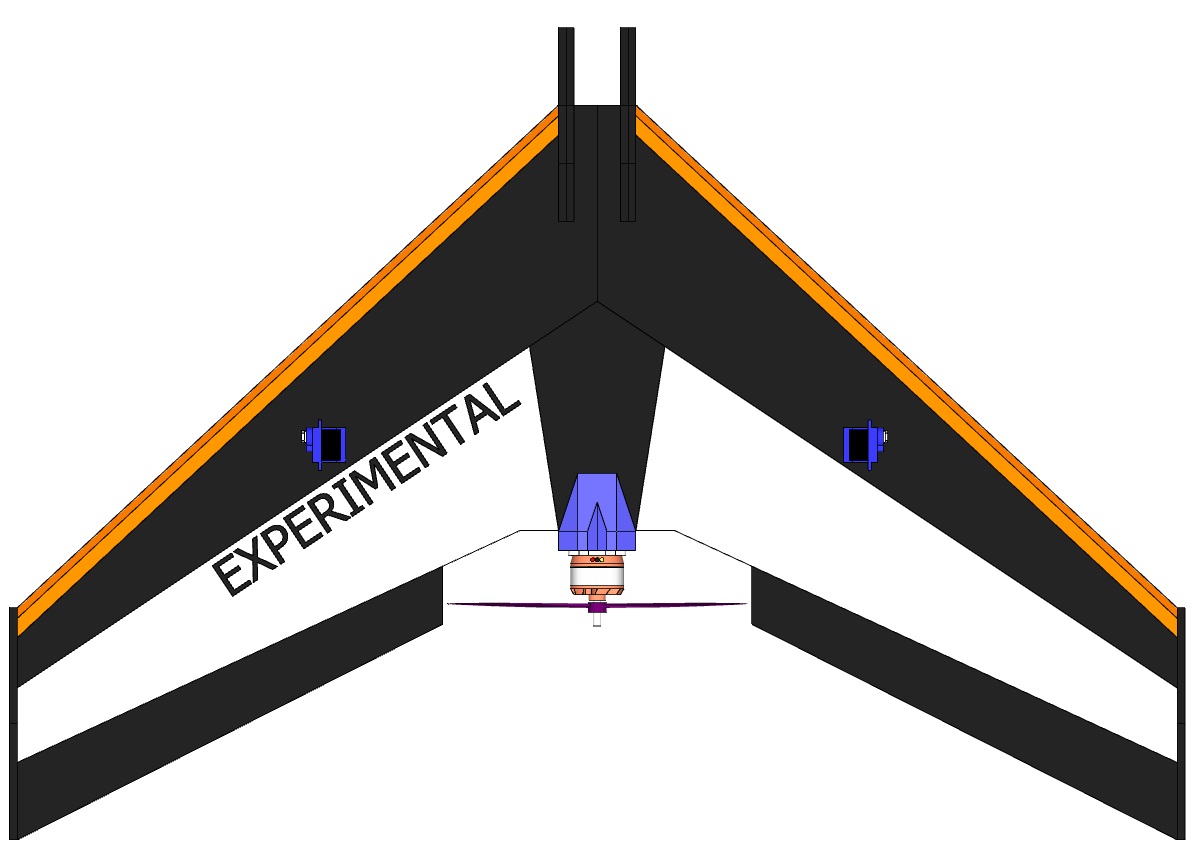
This is not a unique build - it is a result of reading through many other builder’s experiences and scratch builds, with the goal of designing and successfully flying the least expensive, fastest to build delta wing. The wing profile is based on a simplified KFm airfoil design (KFm-2). However, since the lift generated is not great, it needs to fly at fast speeds (NOT good as a trainer). Overall dimensions chosen are to try to ensure the entire center plane can be cut from one sheet of foam board. Some variations to the design are included in the files section. The following site helps with overall dimensions and calculations regarding the center of mass: http://rcwingcog.a0001.net/?i=1
The choice of materials will affect the design of the airplane, so it’s important to know what you’ll need before you start the build.
Foam Board
What makes this frame so cheap is the fact that it is made from 2D foam board. This board is most often found at dollar stores for around $1 to $2 each and is a general purpose material used for presentations (look in the section which contains classic Bristol / poster board). The board looks like thin foam sandwiched between paper and is around 3/16” thick (or 5mm) and very light weight. It almost always comes in white, though black can often be found too. Dimensions sold seem to be around 20” x 30”, or 800mm x 1000mm.
Given that the top and bottom are basically paper, you can change the color without any problem by whatever means you want. Your should do your best to obtain this before considering using other materials. If you can’t get the exact dimensions of the board which correspond with the design, you can either scale the design (within reason), or split it over multiple boards. one white board and one black board make for a very nice effect.
Foam board insulation
The second part of the frame is what will be used to create a motor mount. The suggested material is foam board insulation (Extruded polystyrene, or XPS), most widely used to insulate walls in houses. This is NOT to be confused with foam which has beads (Expanded polystyrene, or EPS). XPS foam is hard to compress and can be sculpted with a knife, sawed etc. while being incredibly lightweight. It’s readily available from stores which sell building supplies for homes, is incredibly inexpensive, but the size (4 feet x 8 feet for example) is far, far more than is needed. A bit of scrap XPS around 2” thick (or stacked 1”) is all you need (neighbor, scrap from a construction site etc.). If you absolutely cannot find this material, you can create a motor mount using the white foam board.
Motor supports
0.25” to 1” long (threaded) plastic standoffs and corresponding screws. These are going to be inserted (and glued) into the foam above.
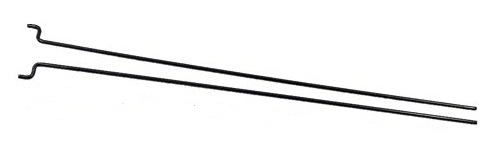
Control Rods & Control Horn
The control rods will link the horn of the servo to the control horn installed in the ailerons. The ideal control rod for this application is the metal handle which can be found on many Chinese / Asian takeout boxes. Metal coat hangers tend to be too thick and heavy for this application. A hardware store might have something like a general purpose small diameter metal rod which can be used (either shipped straight or round around a spool). Whatever you find, be sure to straighten it (using pliers, a hammer, a vise etc.).
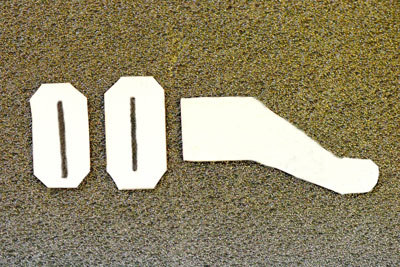
Plastic control horns tend to be very inexpensive, but if you’re interested in creating your own, all you need is a durable, thin piece of plastic. If you can find plastic with a 90 degree bend (rectangular plastic container for example) the horn will be all that more rigid.
Motor + Propeller + ESC
The combination of motor + propeller should provide at least 0.6Kg of thrust at full throttle (the more the better). Ideally between 1500 and 2500kv and can operate using a 2S or 3S LiPo (7.4V or 11.1V)The motor should weigh ideally <30g. The (discontinued) HobbyKing Donkey ST2204 combo was the least expensive BLDC motor + ESC + connector combination we found which did not require any soldering. The wing easily had enough thrust to accelerate vertically against gravity (thrust to weight ratio of around 2:1).
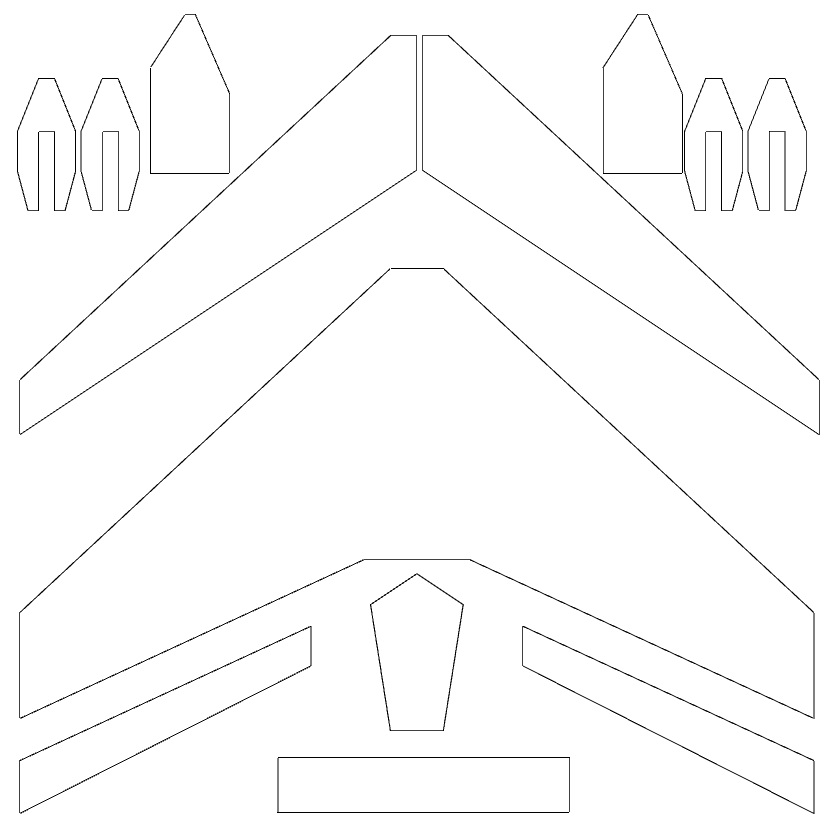
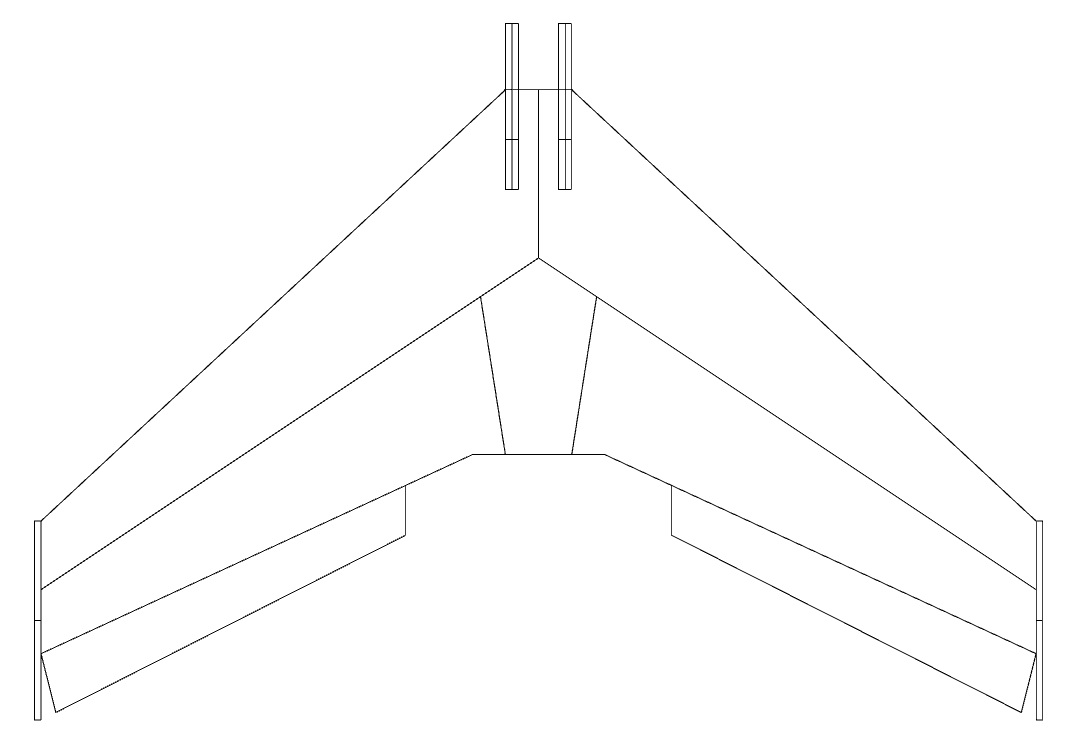
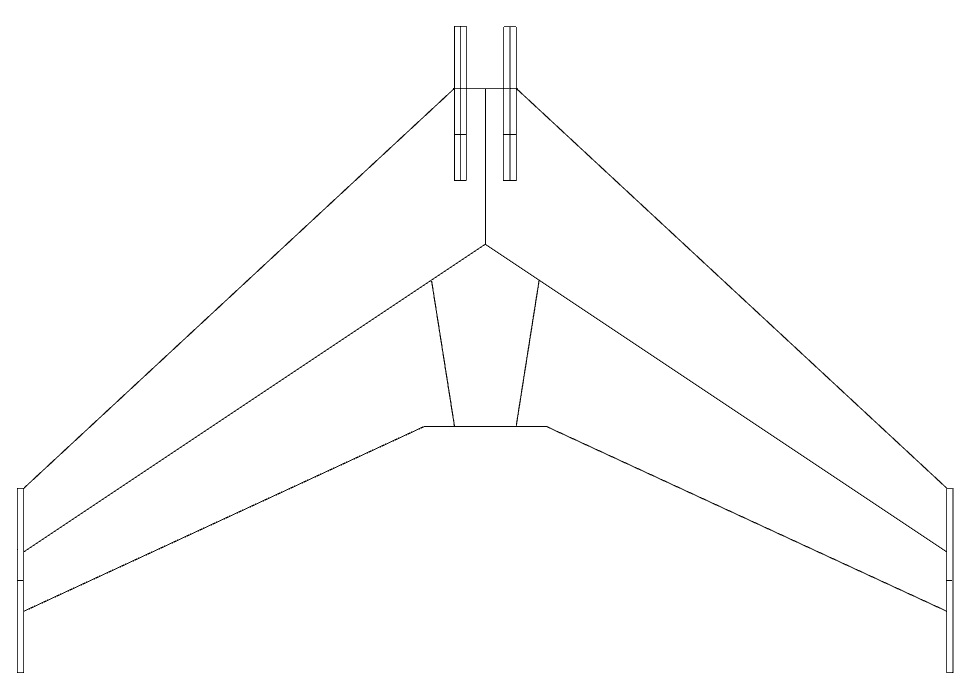
Measure twice, cut once. Despite this, you might need a few spare sheets as you become familiar with cutting the foam board in a straight line. If you’re new to this type of flying wing, trace the proposed design before altering it. Under attachments, you’ll find a design for a wing based on a 22” x 36” sheet which you can open in Google Sketchup (free software). Some of the dimensions are indicated, though you can use "Tools -> Dimensions" to check any and all dimensions. once again, if the foam board you find is smaller, then split the design over two (or more) boards. If you're comfortable modifying the design, dimension your own custom frame using this excellent tool: http://rcwingcog.a0001.net/
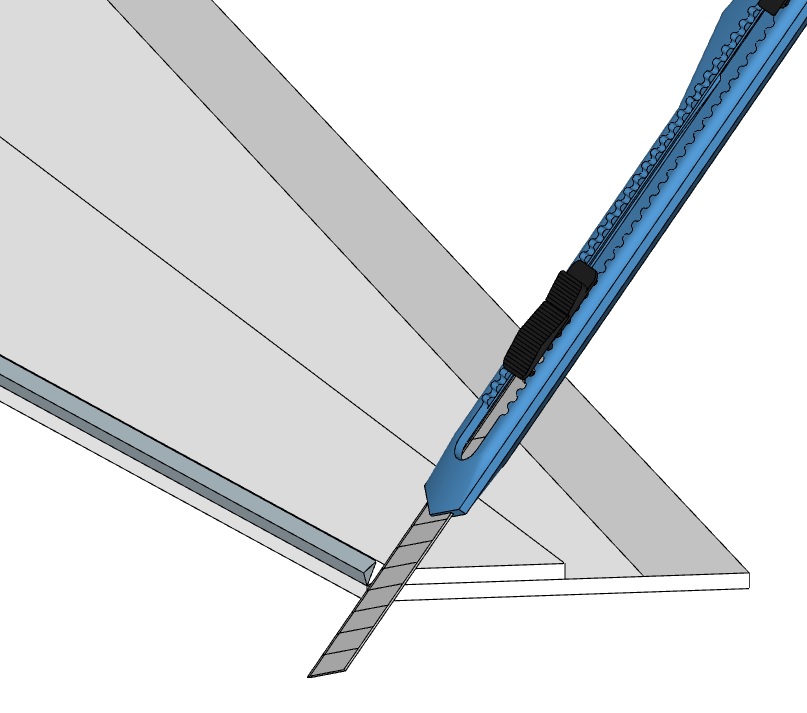
In order to cut the sections out of the foam, we strongly suggest a long, straight and rigid material (which cannot be easily cut with a knife) to use as a guide (ex. a long metal ruler). Given that we made quite a few of these frames, a long “general purpose” rectangular metal plate ~1m long was purchased for $5 at a local hardware store. You will also need a new, very sharp knife (retractable $1 utility knife is perfect or an Exacto knife).
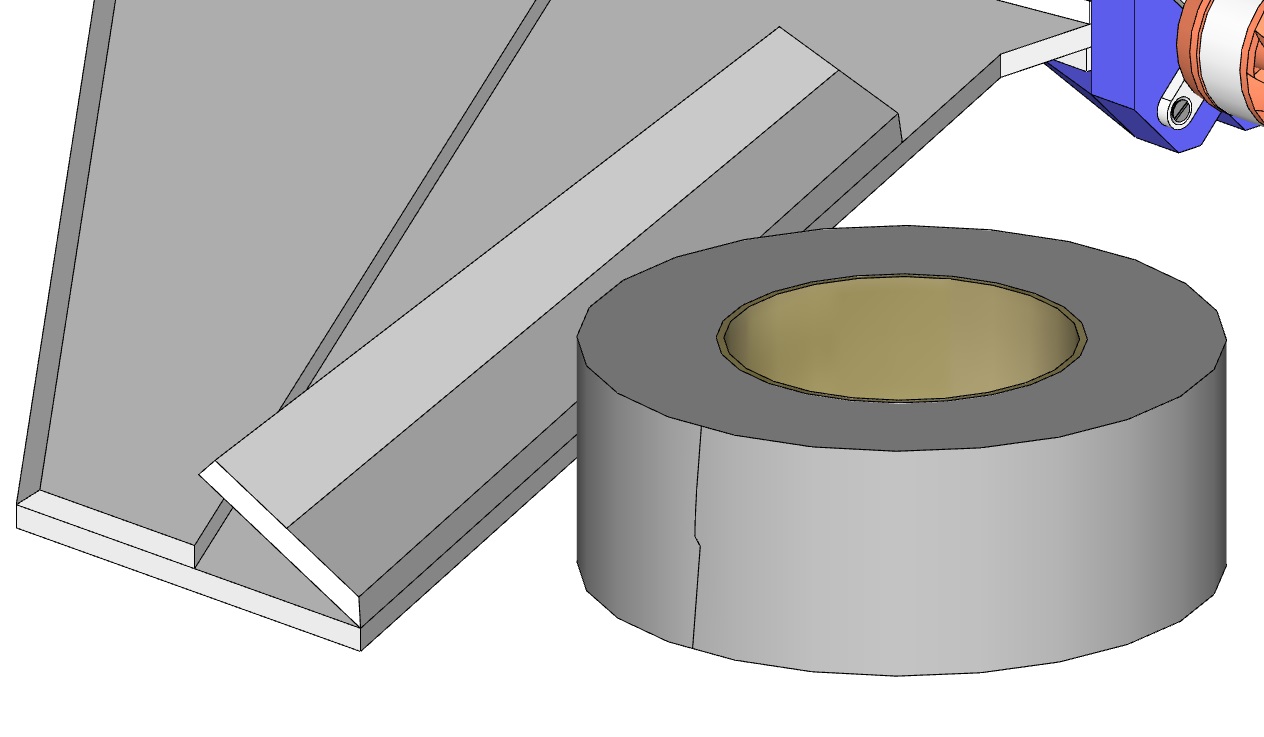
The top board of each leading edge needs to be trimmed into order to make the profile. One edge of the surface is placed against the straight edge, and the knife is used to slice at a 45 degree angle. This is most easily done by tracing a line on the top of the wing which is the same thickness as once piece of the foam (normally 3/16” or 5mm). The same needs to be done to the lower edge of each flap, as shown in the image below.
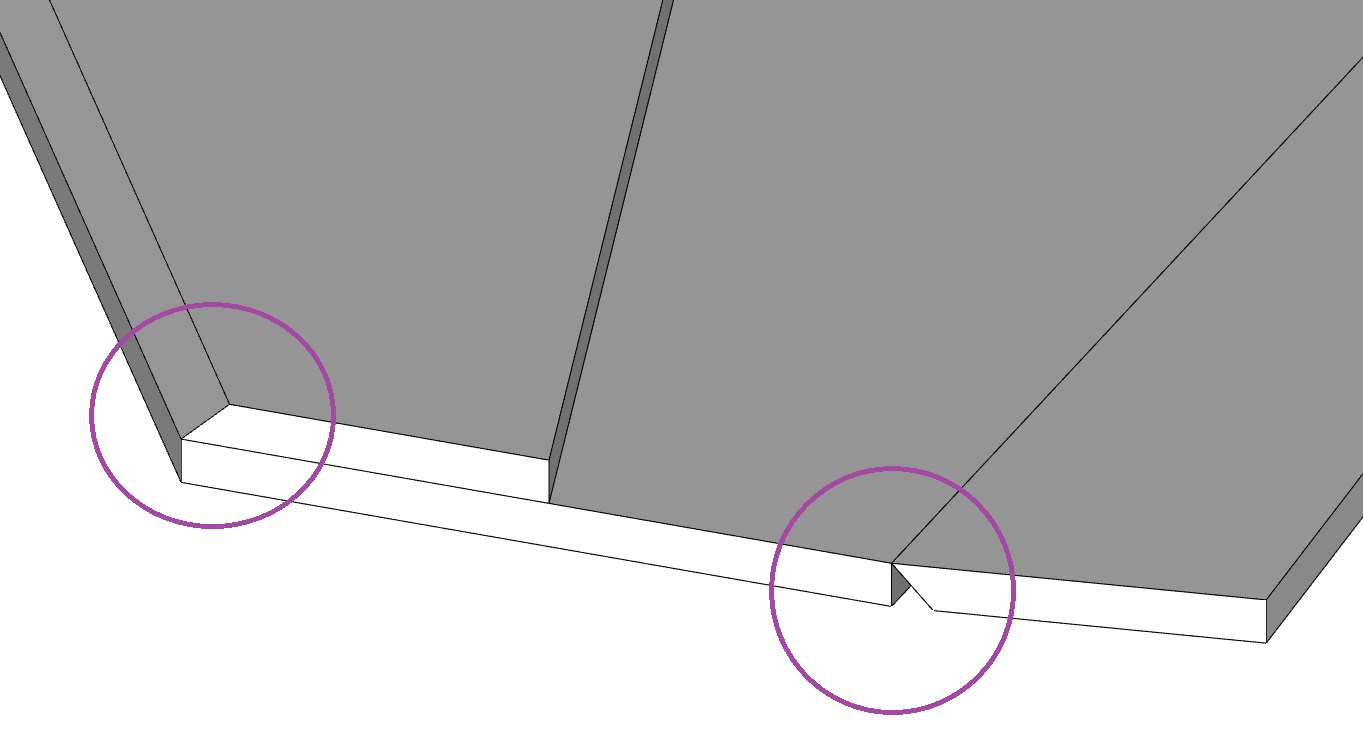
Note that the ends of the ailerons need to be trimmed to allow for full motion about the hinge, as shown in the image below:
Use normal white glue (ex Elmer’s) and spread the glue over the entire surface to be glued using a flat object like a popsicle stick, taking care to use only a minimum of glue and wiping away the excess. If you want to prevent warping, glue one section at a time and lay the parts being glued between two very flat objects, like a table and a large, heavy book. The ailerons are installed later.
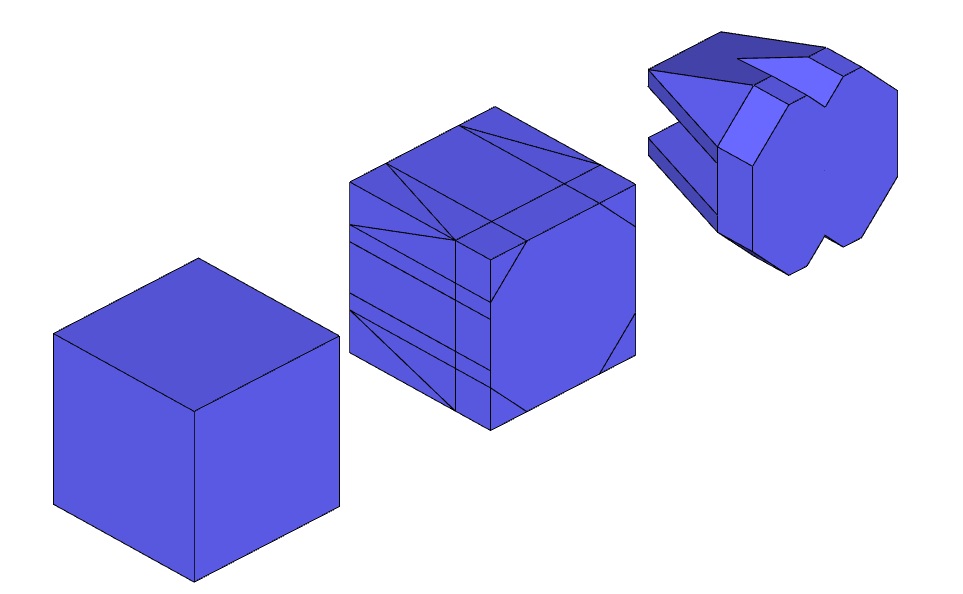
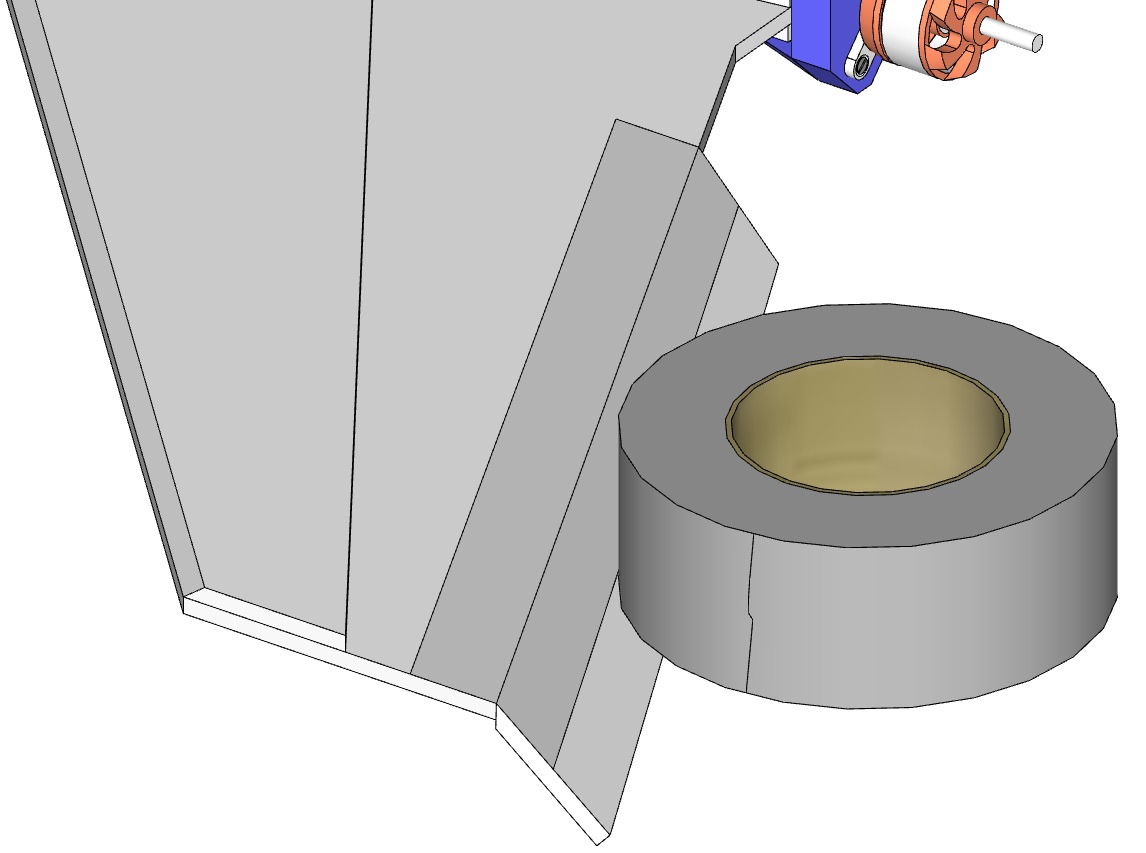
Foam board is incredibly easy to cut using a utility knife, so be careful not to cut yourself in the process. To sculpt the board nicely, use a ruler and trace a 2” cube (which is all you need) and cut it out. Next, we need to make it aerodynamic, but at the same time, have the surface needed to insert the motor mount later. Trace the profile (it does not need to be exactly as shown in the sample, though the sample works quite well), and remove each section by extending the knife as far as possible and slicing through the foam.
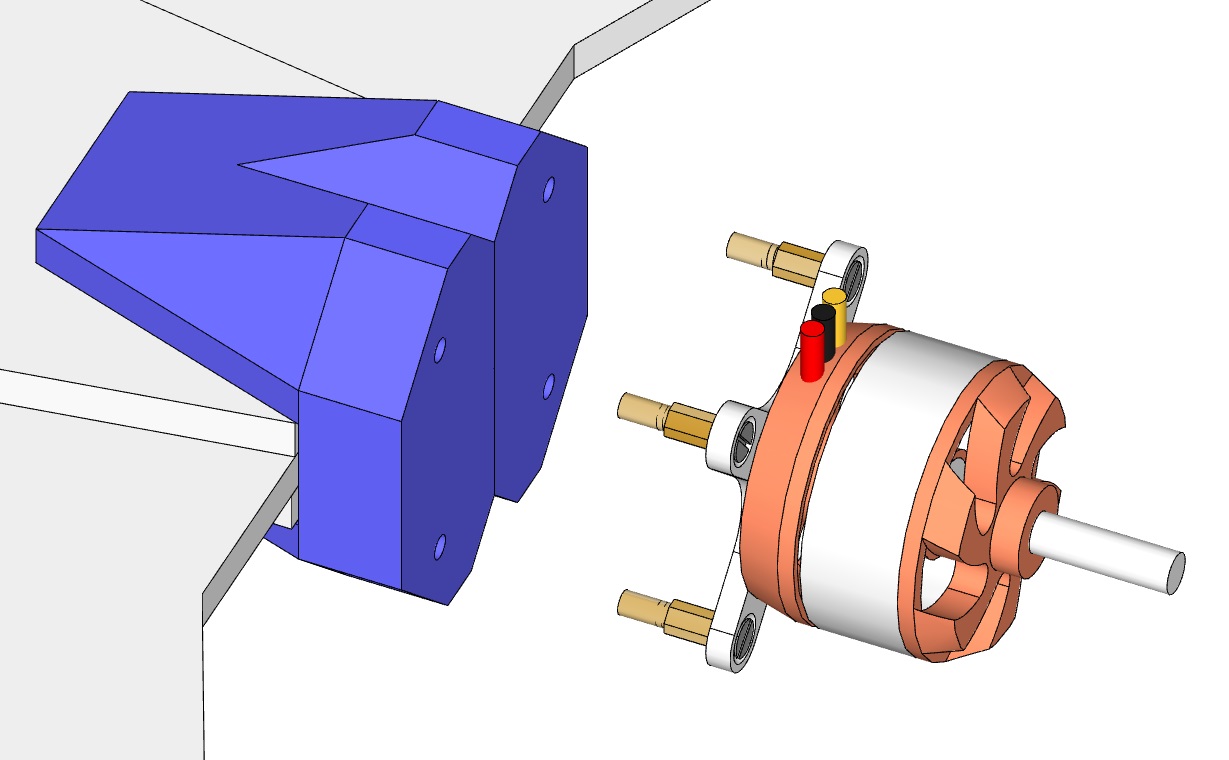
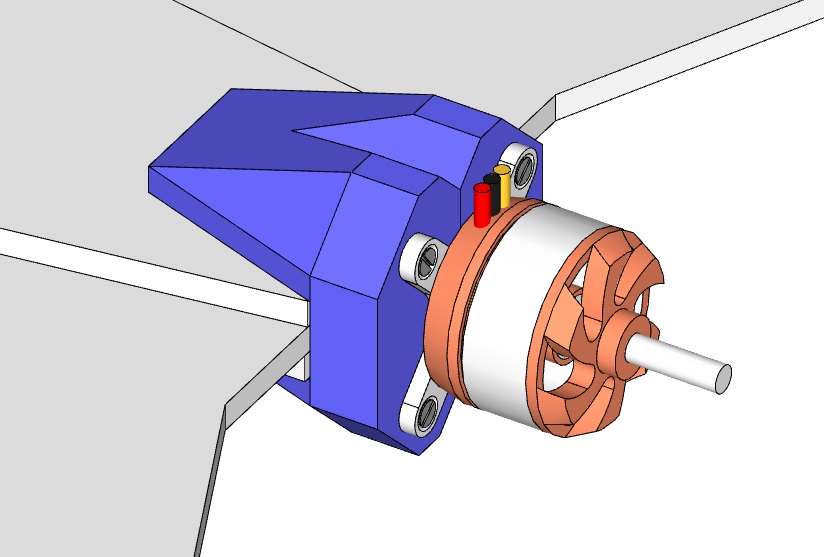
The next step requires you to already have the motor, motor mount, standoffs and screws. Connect the motor to the motor mount, then the standoffs and screws to the motor mount. You need to pierce four mating holes in the foam which fit the standoffs. Take special care with this step since the motor needs to be mounted on-axis, or else the wing won’t fly straight. We would propose using a small drill to pierce the initial holes, then move on to larger bits, taking care not to snag the foam and tear it apart. Feel free to experiment with creating proper holes using scrap foam before doing it with the sculpted foam mount.
Press the motor + mount + standoff assembly into the holes in the mount and check alignment, and then test fit this new assembly on the wing itself. “Close enough” will create issues in flight, so try to be as straight as possible along the center of the wing, and try to ensure the motor is as straight as possible. once ready, glue the foam to the wing using white glue, then add glue within the holes in the foam mount and press the standoffs inside and let the glue set.
Using normal transparent packing tape at least 1” wide, flip the flap on top of the wing and tape (as shown). Rotate the flap as far as it will go downwards, and add tape to the top, creating a lightweight hinge. The images are shown without the winglets. Note that you need to have trimmed the ends of the ailerons at this stage.
Draw / add the following design on the bottom of the drone where the center of mass should be according to the site http://rcwingcog.a0001.net/. When all items have been installed on the frame (servos, motor, receiver etc.) the airplane should balance on this point and the nose should not dip nor fall. The easiest way to adjust the center of mass is to adjust the position of the battery. Suggested positions for each component will be explained later.
This step is entirely optional.
The foam board on its own is actually incredibly rugged and the front bumpers take the shock of an impact incredibly well. During flights, we’ve nosedived from around 150 feet straight into the asphalt of a parking lot, and aside from a bit of flex / compression of the bumpers, nothing was broken and the plane was in the air again within seconds.
If you want to ruggedize the frame, consider using the same clear packing tape to wrap the leading edge of each wing. We used a thin piece of colored vinyl (with adhesive back) instead of tape. If weight is a concern, and you still want added rigidity, then you might consider a separate frame where the paper on either side of the foam board is removed (manually), and replaced it with tape.
One popular option is to include a reinforcement “beam” (thin metal rod for example) running the width of the wing. This adds quite a lot of rigidity, without adding much weight. This having been said, if you are able to fit the entire wing within the foam board, a reinforcement beam is not really necessary
The 9g servos can be glued roughly as in the image below, and should be symmetric. Note that the horns will need to be removed, the servos centered, and then replaced vertically.
Straighten the metal handle from the takeout food packaging and then cut it into two pieces. Using needle nose pliers (or normal pliers) create a flat s-bend as shown. The opposite end of the rod may or may not need to be bent depending on the control horn you select or build.
Next, two pivots ("control horns") needs to be made or purchased. There are many designs on Thingiverse which can be 3D printed, and you can use a flat piece of plastic and scissors to create your own, ensuring it is rigid and can remain vertical. The foam is not an ideal candidate for this part, and in the main photo, a pack of 10 control horns was purchased online for roughly $2. However you buy or create this part, check that it remains vertical, well affixed to the aileron and is rigid. It can be installed parallel to the servo, around 1.5 to 2" from the inner edge of each aileron.
Placement of the control horns:
Three (preferably four or more) channel RC transmitter and receiver. Note that the RC receiver should be as small and lightweight as possible. In some cases, it might even be preferable to remove the plastic case and instead enclose it in large shrink wrap. Keep in mind that your transmitter needs to be set correctly - check that the throttle (normally the left joystick) works as it should, and the right joystick controls up and down and roll left and roll right. Be sure to adjust the trim to ensure when the joysticks are centered, the ailerons are centered and the plane will fly straight.
You will need two standard 9g RC servo motors (~$3 each), and, depending on how far away you place them, might need a pair of servo extension cables. Normally RC servos include at least 6" of wire, which is sufficient.
Assuming you chose a motor + ESC combo which has a BEC (battery Elimination Circuit), you can get away with using one main battery, and the BEC will power the receiver and the servos. If it can provide sufficient current, it will also be used to power the flight controller.
As for the battery pack, verify the motor's nominal operating voltage which likely corresponds to a 2S or 3S battery (7.4V ot 11.1V). The pack cannot be too large or heavy, so ~1400mAh to 2000mAh tends to be sufficient. Keep in mind the entire airplane WITH electronics and battery needs to weigh less than 350g in order to get a nice ~two to one thrust to weight ratio.
Before adding a flight controller, learn how to fly this airplane and be comfortable when encountering unknown situations.

 Các chuyên mục
Các chuyên mục